Одновременная локализация и картографирование рынка
Одновременная локализация и картирование размера рынка, доли, роста и отраслевого анализа по типу (EKF SLAM, Fast SLAM, SLAM на основе графиков, другие), по предложению (2D SLAM, 3D SLAM), по применению (БПЛА, роботы, AR/VR, автономные транспортные средства) и региональный анализ, 2025-2032
Страницы: 170 | Базовый год: 2024 | Релиз: август 2025 г. | Автор: Versha V. | Последнее обновление: март 2026 г.
Одновременная локализация и картографирование (SLAM) — это вычислительный метод, который позволяет автономным системам, таким как роботы, дроны и беспилотные транспортные средства, создавать карту незнакомой среды и определять свое положение в ней.
Он использует данные от датчиков, таких как LiDAR, камер и инерциальных измерительных блоков (IMU), для выполнения картографирования и локализации в реальном времени. Это обеспечивает точную навигацию и обход препятствий в незнакомых или недоступных для GPS местах. SLAM широко используется в робототехнике, дополненной реальности, автономных транспортных средствах и беспилотных летательных системах.
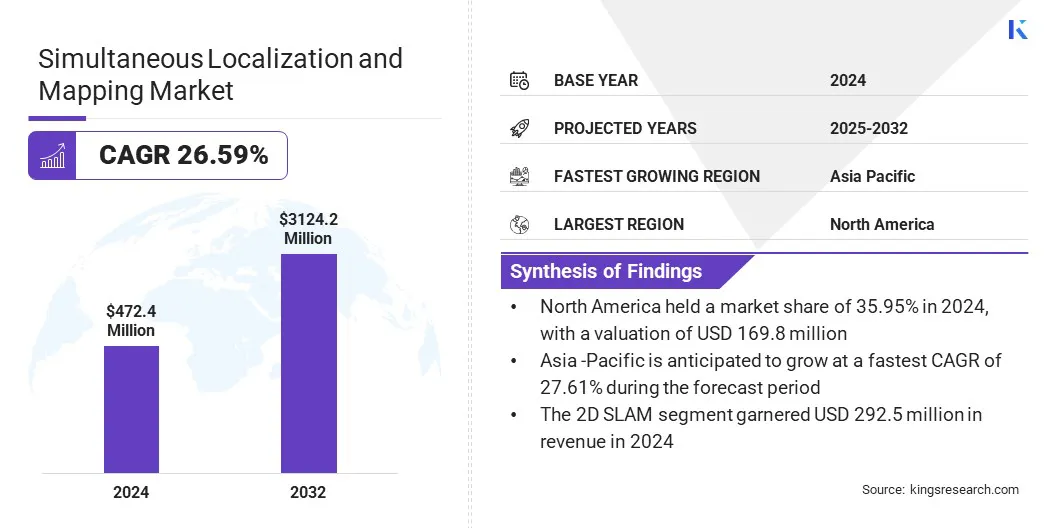
Объем глобального рынка одновременной локализации и картографии оценивался в 472,4 миллиона долларов США в 2024 году и, по прогнозам, вырастет с 597,1 миллиона долларов США в 2025 году до 3 124,2 миллиона долларов США к 2032 году, демонстрируя среднегодовой темп роста 26,59% в течение прогнозируемого периода.
Растущее внедрение SLAM в автоматизации логистики и складской робототехнике ускоряет рост рынка за счет поддержки автономной навигации, оптимизации эффективности рабочих процессов и снижения эксплуатационных затрат на крупных объектах. Более того, растущая интеграция SLAM с AR и VR стимулирует рынок, обеспечивая иммерсивный опыт и улучшая пространственное картографирование.
Ключевые моменты:
В 2024 году объем отрасли одновременной локализации и картографии составил 472,4 миллиона долларов США.
Прогнозируется, что рынок будет расти в среднем на 26,59% в период с 2025 по 2032 год.
В 2024 году доля рынка Северной Америки составила 35,95% при оценке 169,8 млн долларов США.
В 2024 году выручка сегмента EKF SLAM составила 171,1 млн долларов США.
Ожидается, что к 2032 году сегмент 2D SLAM достигнет 1 883,3 миллиона долларов США.
В 2024 году доля рынка БПЛА составила 28,08%.
Ожидается, что в Азиатско-Тихоокеанском регионе среднегодовой темп роста составит 27,61% в течение прогнозируемого периода.
Крупнейшими компаниями, работающими на рынке одновременной локализации и картографирования, являются Clearpath Robotics, MAXST Co., Ltd, Qualcomm Technologies, Inc, Martinez Geospatial, Slamcore Ltd, Ouster Inc, FARO, Kudan, NavVis, ABB Ltd, Boston Engineering, Intel Corporation, NVIDIA Corporation, SAMSUNG и KUKA AG.
Объем отчета о рынке одновременной локализации и картирования
Сегментация
Подробности
По типу
ЭКФ СЛЭМ,Fast SLAM, SLAM на основе графов, другие
Предлагая
2D SLAM, 3D SLAM
По применению
БПЛА, роботы, AR/VR, автономные транспортные средства, другое
По регионам
Северная Америка: США, Канада, Мексика
Европа: Франция, Великобритания, Испания, Германия, Италия, Россия, Остальная Европа.
Азиатско-Тихоокеанский регион: Китай, Япония, Индия, Австралия, АСЕАН, Южная Корея, остальные страны Азиатско-Тихоокеанского региона.
Ближний Восток и Африка: Турция, ОАЭ, Саудовская Аравия, Южная Африка, остальной Ближний Восток и Африка.
Южная Америка: Бразилия, Аргентина, остальная часть Южной Америки.
Одновременная локализация и картографирование рынкаРегиональный анализ
В зависимости от региона рынок подразделяется на Северную Америку, Европу, Азиатско-Тихоокеанский регион, Ближний Восток и Африку и Южную Америку.
Северная Америкаодновременная локализация и картографирование рынкаВ 2024 году доля составила около 35,95% при оценке в 169,8 млн долларов США. Такое доминирование объясняется растущей интеграцией служб картографирования и пространственных данных на базе искусственного интеллекта по всему региону. Предприятия в регионе инвестируют в инфраструктуру локализации в реальном времени и облачную картографическую инфраструктуру для поддержки развития технологий автоматического вождения.
Разработка навигационных систем, предназначенных для виртуального тестирования и проверки функций автоматического вождения, ускоряет внедрение SLAM в автомобильном и мобильном секторах за счет снижения затрат на тестирование, сокращения циклов разработки и повышения безопасности, тем самым способствуя расширению рынка в регионе.
Кроме того, организации в регионе внедряют передовые платформы определения местоположения и картографии, которые могут обрабатывать большие объемы пространственных данных в режиме реального времени для поддержки подключенных и автоматизированных транспортных систем, включая приложения для автономного вождения и помощи водителю. Региональные предприятия продолжают инвестировать в технологии локализации, чтобы обеспечить точную навигацию и пространственное понимание, что еще больше способствует расширению рынка в регионе.
В январе 2025 года HERE Technologiesв партнерствес AWS для поддержки сервисов картографирования и определения местоположения на основе искусственного интеллекта для программно-определяемых транспортных средств. Сотрудничество направлено на обеспечение навигации в реальном времени и обработку пространственных данных, что будет способствовать созданию приложений, связанных с SLAM, в автоматизированных системах вождения.
Ожидается, что в течение прогнозируемого периода индустрия одновременной локализации и картографии в Азиатско-Тихоокеанском регионе будет расти уверенными среднегодовыми темпами в 27,61%. Этот рост объясняется растущим внедрением технологий визуального SLAM в новых приложениях, таких как вещание дополненной реальности и передовые системы восприятия в регионе.
Ключевые игроки внедряют решения SLAM для прямых трансляций событий, доставки контента дополненной реальности и иммерсивных цифровых впечатлений. Это ведет к более широкому внедрению в таких секторах, как спорт, развлечения и цифровые медиа, а также к устоявшемуся использованию в промышленной робототехнике. Растущий объем приложений ускоряет коммерческое внедрение и технологический прогресс в регионе.
Одновременная локализация и картографирование рынкаОбзор
Кроме того, интеграция визуального SLAM и Edge AI в автономную мобильную робототехнику стимулирует рынок, предоставляя экономически эффективные и масштабируемые роботизированные решения. Это снижает зависимость от дорогих датчиков, таких как LiDAR, и поддерживает навигацию в реальном времени в динамических средах. Это достижение расширяет внедрение SLAM в отраслях логистики, производства и здравоохранения.
В январе 2025 года NexAIoT представила на выставке CES своего автономного мобильного робота NexMOV-2, оснащенного визуальным SLAM, 3D-видением на базе искусственного интеллекта и NPU KL730 от Kneron. Разработанный для промышленного использования, он обеспечивает точную навигацию без LiDAR, обеспечивая масштабируемое и эффективное развертывание.
Драйвер рынка
Растущее внедрение SLAM в автоматизации логистики и складской робототехнике
Ключевым фактором развития рынка SLAM является растущее внедрение технологии SLAM в автоматизации логистики искладская робототехника. Логистические и складские операторы все чаще применяют автономных мобильных роботов (AMR), работающих на базе технологии SLAM, для решения проблемы растущей сложности цепочки поставок и нехватки рабочей силы. Эти системы поддерживают эффективную навигацию и принятие решений в режиме реального времени, что помогает предприятиям поддерживать высокую производительность и адаптируемость.
SLAM обеспечивает точную локализацию и картографирование в динамических настройках склада и снижает потребность в фиксированной инфраструктуре. Этот сдвиг способствует повышению эффективности и масштабируемости технологии SLAM в современной внутренней логистике.
В ноябре 2024 года компания Geek+ в партнерстве с Intel представила свое решение для роботов Vision-Only Robot, включающее технологию V-SLAM и модули визуальной навигации Intel. Система позволяет автономным мобильным роботам перемещаться без внешних датчиков, что позволяет повысить точность и эффективность логистических операций.
Трудности интеграции гетерогенных аппаратных платформ представляют собой серьезную проблему для рынка SLAM. Системные устройства с поддержкой SLAM часто используют различные датчики, процессоры, операционные системы и протоколы связи, что усложняет обеспечение бесперебойного взаимодействия.
Обеспечение совместимости между такими компонентами, как LiDAR, камеры, IMU и встроенные процессоры, требует обширной калибровки и настройки. Эти несоответствия могут привести к задержкам производительности, неточной локализации или сбоям системы. Кроме того, отсутствие стандартизированных интерфейсов и промежуточного программного обеспечения увеличивает затраты на разработку и замедляет развертывание различных робототехнических, автомобильных и AR/VR-приложений.
Чтобы решить эту проблему, игроки рынка разрабатывают модульные и платформенно-независимые решения SLAM. Они сосредоточены на создании стандартизированного промежуточного программного обеспечения, API и платформ объединения датчиков, которые поддерживают полную совместимость с различными датчиками и процессорами.
Участники рынка инвестируют в кроссплатформенные библиотеки SLAM и используют экосистемы с открытым исходным кодом, такие как ROS (операционная система робота). Стратегическое сотрудничество с производителями оборудования и внедрение инструментов автоматической калибровки на основе искусственного интеллекта еще больше помогают упростить интеграцию, сократить время разработки и обеспечить надежную производительность в различных средах и устройствах.
Рыночный тренд
Растущее использование Visual SLAM в мобильной робототехнике
Основной тенденцией на рынке SLAM является растущее использование визуального SLAM в мобильной робототехнике для обеспечения восприятия в реальном времени и автономной навигации в сложных средах. Разработчики робототехники интегрируют системы на основе машинного зрения, которые объединяют данные камеры с алгоритмами искусственного интеллекта для создания подробных пространственных карт и отслеживания движения, не полагаясь на внешнюю инфраструктуру.
Это побуждает к развертыванию интеллектуальных роботов на складах, фабриках и в сфере обслуживания. Эти достижения повышают точность локализации и осведомленность об окружающей среде, позволяя мобильным роботам достичь большей гибкости, масштабируемости и возможностей принятия решений в промышленных средах.
В мае 2024 года компания ABB выпустила автономного мобильного робота Flexley Tug T702, оснащенного технологией Visual SLAM с поддержкой искусственного интеллекта и пакетом программного обеспечения AMR Studio.Робот сочетает в себе трехмерное зрение и искусственный интеллект, чтобы различать динамические и статические объекты, работать независимо в сложных средах и сокращать время ввода в эксплуатацию. Запуск поддерживает более широкое внедрение интеллектуальных, масштабируемых систем SLAM в секторах логистики и производства.
Сегментация рынка:
По типу (EKF SLAM, Fast SLAM, SLAM на основе графов и другие). Сегмент EKF SLAM заработал 171,1 миллиона долларов США в 2024 году благодаря своей вычислительной эффективности и широкому использованию во встроенных системах с низким энергопотреблением.
По предложению (2D SLAM и 3D SLAM). В 2024 году сегмент 2D SLAM занимал 61,92% рынка благодаря своей простоте, более низким требованиям к обработке и пригодности для структурированных внутренних помещений.
По применению (БПЛА, роботы, AR/VR и автономные транспортные средства). По прогнозам, к 2032 году сегмент БПЛА достигнет 878,2 млн долларов США благодаря увеличению количества дронов с поддержкой SLAM для картографирования, наблюдения и операций по доставке.
Нормативно-правовая база
В СШАФедеральная комиссия по связи (FCC) регулирует беспроводную связь и радиочастотный спектр, используемый в устройствах с поддержкой SLAM. Это гарантирует, что датчики, такие как LiDAR, радар и беспроводные модули, работают в разрешенных диапазонах частот, чтобы избежать помех.
В КитаеМинистерство промышленности и информационных технологий (МИИТ) регулирует работу устройств SLAM, контролируя лицензирование, использование спектра и соблюдение кибербезопасности и промышленных стандартов.
В Индии, Инженерный центр электросвязи (TEC) при Департаменте телекоммуникаций регулирует технические стандарты для беспроводных датчиков и интерфейсов связи, используемых в системах SLAM. Он сертифицирует оборудование на безопасность и электромагнитную совместимость.
Конкурентная среда
Крупнейшие игроки в отрасли одновременной локализации и картографии (SLAM) интегрируют технологии трехмерного видения на базе искусственного интеллекта для улучшения пространственной осведомленности и автономной навигации в мобильных роботизированных системах. Они сосредоточены на повышении гибкости, точности и масштабируемости решений SLAM для поддержки операций в динамичных реальных средах.
Кроме того, они оптимизируют картографические системы для более быстрой настройки, разрабатывают алгоритмы, адаптирующиеся к изменяющимся условиям, и совершенствуют обработку данных в реальном времени для обеспечения бесперебойной работы.
В январе 2024 года ABB приобрела швейцарский стартап Sevensense, разработчика технологии Visual SLAM с поддержкой искусственного интеллекта дляавтономные мобильные роботы. Это приобретение укрепит позиции ABB на рынке AMR следующего поколения за счет интеграции 3D-навигации в ее портфолио робототехники.
Ключевые компании на рынке одновременной локализации и картографирования:
В марте 2025 г.Компания Meta представила умные очки Aria Gen 2 как исследовательское устройство, оснащенное камерами 6DOF SLAM, обработкой данных на устройстве в режиме реального времени и мультимодальными датчиками. Устройство, предназначенное для развития машинного восприятия, робототехники и исследований доступности, служит платформой для тестирования пространственного восприятия и взаимодействия, управляемого искусственным интеллектом.
Новый
Часто задаваемые вопросы
Каков ожидаемый среднегодовой темп роста рынка одновременной локализации и картографирования в течение прогнозируемого периода?
Насколько велика была отрасль в 2024 году?
Каковы основные факторы, движущие рынок?
Кто является ключевыми игроками на рынке?
Какой регион на рынке будет наиболее быстрорастущим в прогнозируемый период?
Какой сегмент, как ожидается, будет занимать наибольшую долю рынка в 2032 году?
Автор
Верша имеет более чем 15-летний опыт управления консалтинговыми заданиями в различных отраслях, включая продукты питания и напитки, потребительские товары, ИКТ, аэрокосмическую промышленность и другие. Ее междисциплинарный опыт и способность к адаптации делают ее универсальным и надежным профессионалом. Обладая острыми аналитическими способностями и любопытным мышлением, Верша преуспевает в преобразовании сложных данных в практические идеи. Она имеет успешный опыт определения динамики рынка, выявления тенденций и предоставления индивидуальных решений для удовлетворения потребностей клиентов. Будучи опытным лидером, Верша успешно обучал исследовательские группы и точно руководил проектами, обеспечивая высококачественные результаты. Ее подход к сотрудничеству и стратегическое видение позволяют ей превращать проблемы в возможности и последовательно добиваться впечатляющих результатов. Анализируя рынки, привлекая заинтересованные стороны или разрабатывая стратегии, Верша опирается на свой глубокий опыт и отраслевые знания для стимулирования инноваций и достижения измеримой ценности.
Имея более десяти лет опыта руководства исследованиями на глобальных рынках, Ганапати обладает острым суждением, стратегической ясностью и глубокой отраслевой экспертизой. Известный своей точностью и непоколебимой приверженностью качеству, он направляет команды и клиентов с инсайтами, которые постоянно обеспечивают значимые бизнес-результаты.