


동시 현지화 및 매핑 시장
동시 현지화 및 매핑 시장 규모, 점유율, 성장 및 산업 분석, 유형별(EKF SLAM, Fast SLAM, 그래프 기반 SLAM, 기타), 제공별(2D SLAM, 3D SLAM), 애플리케이션별(UAV, 로봇, AR/VR, 자율 주행 차량) 및 지역 분석, 2025-2032
페이지: 170 | 기준 연도: 2024 | 출시: 2025년 8월 | 저자: Versha V. | 마지막 업데이트: 2026년 3월
지금 문의하세요
페이지: 170 | 기준 연도: 2024 | 출시: 2025년 8월 | 저자: Versha V. | 마지막 업데이트: 2026년 3월
SLAM(동시 위치 파악 및 매핑)은 로봇, 드론, 자율 주행 차량과 같은 자율 시스템이 익숙하지 않은 환경의 지도를 만들고 그 안에서 위치를 결정할 수 있도록 하는 계산 기술입니다.
LiDAR, 카메라, 관성 측정 장치(IMU)와 같은 센서의 데이터를 사용하여 실시간 매핑 및 위치 파악을 수행합니다. 이는 GPS가 거부되거나 익숙하지 않은 지역에서 정확한 탐색 및 장애물 회피를 지원합니다. SLAM은 로봇공학, 증강현실, 자율주행차, 무인항공시스템 등에 널리 사용된다.
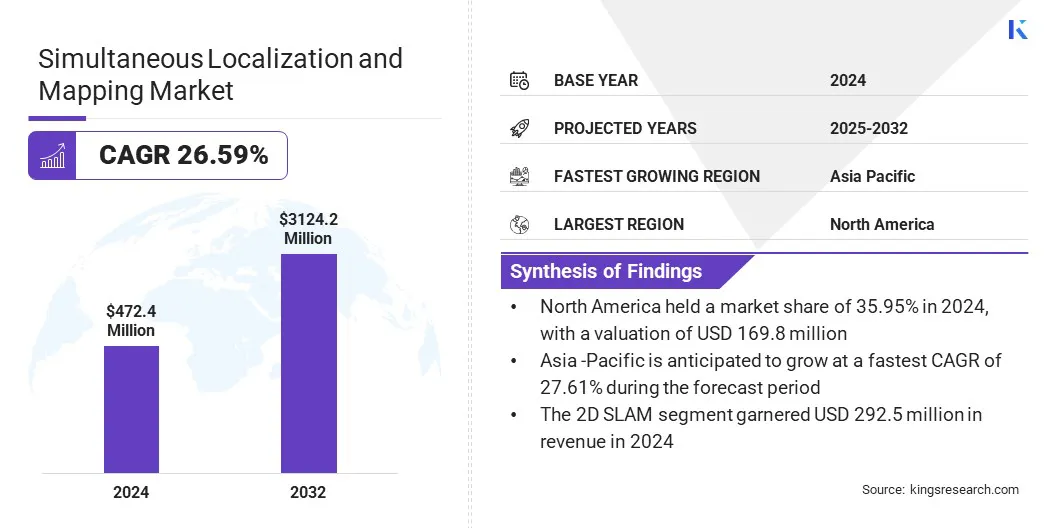
전 세계 동시 현지화 및 매핑 시장 규모는 2024년 4억 7,240만 달러로 평가되었으며, 2025년 5억 9,710만 달러에서 2032년까지 31억 2,420만 달러로 성장하여 예측 기간 동안 CAGR 26.59%를 나타낼 것으로 예상됩니다.
물류 자동화 및 창고 로봇 공학 분야에서 SLAM 구현이 증가함에 따라 자율 탐색을 지원하고 작업 흐름 효율성을 최적화하며 대규모 시설의 운영 비용을 절감함으로써 시장 성장을 가속화하고 있습니다. 또한 AR 및 VR과의 SLAM 통합이 증가하면서 몰입형 경험을 구현하고 공간 매핑을 개선함으로써 시장을 주도하고 있습니다.
동시 현지화 및 매핑 시장에서 활동하는 주요 회사로는 Clearpath Robotics, MAXST Co., Ltd, Qualcomm Technologies, Inc, Martinez Geospatial, Slamcore Ltd, Ouster Inc, FARO, Kudan, NavVis, ABB Ltd, Boston Engineering, Intel Corporation, NVIDIA Corporation, SAMSUNG 및 KUKA AG가 있습니다.
|
분할 |
세부 |
|
유형별 |
EKF 슬램,Fast SLAM, 그래프 기반 SLAM, 기타 |
|
제공으로 |
2D 슬램, 3D 슬램 |
|
애플리케이션별 |
UAV, 로봇, AR/VR, 자율주행차, 기타 |
|
지역별 |
북아메리카: 미국, 캐나다, 멕시코 |
|
유럽: 프랑스, 영국, 스페인, 독일, 이탈리아, 러시아, 기타 유럽 지역 | |
|
아시아태평양: 중국, 일본, 인도, 호주, ASEAN, 한국, 기타 아시아 태평양 지역 | |
|
중동 및 아프리카: 터키, U.A.E, 사우디아라비아, 남아프리카공화국, 기타 중동 및 아프리카 | |
|
남아메리카: 브라질, 아르헨티나, 남미 기타 지역 |
지역에 따라 시장은 북미, 유럽, 아시아 태평양, 중동 및 아프리카 및 남미로 분류되었습니다.
북아메리카동시 현지화 및 매핑 시장2024년 기준 점유율은 약 35.95%로 평가액은 1억 6980만 달러입니다. 이러한 우위는 지역 전반에 걸쳐 AI 기반 매핑과 공간 데이터 서비스의 통합이 증가하고 있기 때문입니다. 이 지역의 기업들은 자율주행 기술의 발전을 지원하기 위해 실시간 위치 파악 및 클라우드 기반 매핑 인프라에 투자하고 있습니다.
자동 운전 기능의 가상 테스트 및 검증을 위해 설계된 내비게이션 시스템의 개발은 테스트 비용을 낮추고 개발 주기를 단축하며 안전성을 향상시켜 자동차 및 모빌리티 부문에서 SLAM 배포를 가속화함으로써 이 지역의 시장 확장에 기여하고 있습니다.
또한, 이 지역의 조직들은 자율 주행 및 운전자 지원 애플리케이션을 포함하여 연결되고 자동화된 차량 시스템을 지원하기 위해 대량의 실시간 공간 데이터를 처리할 수 있는 고급 위치 및 매핑 플랫폼을 채택하고 있습니다. 지역 기업은 정확한 탐색 및 공간 인식을 가능하게 하는 현지화 기술에 지속적으로 투자하여 해당 지역의 시장 확장을 더욱 지원합니다.

아시아 태평양 동시 지역화 및 매핑 산업은 예측 기간 동안 27.61%의 견고한 CAGR로 성장할 것으로 예상됩니다. 이러한 성장은 이 지역의 증강 현실 방송 및 고급 인식 시스템과 같은 새로운 애플리케이션 전반에 걸쳐 시각적 SLAM 기술의 채택이 증가했기 때문입니다.
주요 업체들은 라이브 이벤트 취재, 증강 현실 콘텐츠 전달 및 몰입형 디지털 경험을 위해 SLAM 솔루션을 배포하고 있습니다. 이로 인해 산업용 로봇 공학에서의 확립된 사용 외에도 스포츠, 엔터테인먼트, 디지털 미디어와 같은 분야 전반에 걸쳐 채택이 확대되고 있습니다. 응용 범위가 확대되면서 해당 지역의 상업적 배포와 기술 발전이 가속화되고 있습니다.
또한 자율 모바일 로봇 공학에 시각적 SLAM과 엣지 AI를 통합하면 비용 효율적이고 확장 가능한 로봇 솔루션을 구현하여 시장을 주도하고 있습니다. LiDAR와 같은 고가의 센서에 대한 의존도를 줄이고 동적 환경에서 실시간 탐색을 지원합니다. 이러한 발전으로 인해 물류, 제조, 의료 산업 전반에 걸쳐 SLAM 채택이 확대되고 있습니다.
물류 자동화 및 창고 로봇 공학에서 SLAM 채택 증가
SLAM 시장의 주요 동인은 물류 자동화 및 물류 분야에서 SLAM 기술의 채택이 증가하고 있다는 것입니다.창고 로봇공학. 물류 및 창고 운영자는 증가하는 공급망 복잡성과 노동력 부족을 해결하기 위해 SLAM 기술로 구동되는 자율 모바일 로봇(AMR)을 점점 더 많이 채택하고 있습니다. 이러한 시스템은 효율적인 탐색과 실시간 의사 결정을 지원하여 기업이 높은 생산성과 적응성을 유지하는 데 도움이 됩니다.
SLAM은 동적 창고 설정 내에서 정확한 현지화 및 매핑을 제공하고 고정 인프라의 필요성을 줄입니다. 이러한 변화는 현대 내부물류 분야에서 SLAM 기술의 효율성과 확장성을 향상시킵니다.
이기종 하드웨어 플랫폼 간의 통합 문제
이기종 하드웨어 플랫폼 간의 통합 어려움은 SLAM 시장에 중요한 과제를 제시합니다. SLAM 지원 시스템 장치는 종종 다양한 센서, 프로세서, 운영 체제 및 통신 프로토콜을 사용하므로 원활한 상호 운용성을 달성하기가 복잡합니다.
LiDAR, 카메라, IMU 및 내장 프로세서와 같은 구성 요소 간의 호환성을 보장하려면 광범위한 보정 및 사용자 정의가 필요합니다. 이러한 불일치로 인해 성능 지연, 부정확한 현지화 또는 시스템 오류가 발생할 수 있습니다. 또한 표준화된 인터페이스와 미들웨어가 부족하면 개발 비용이 증가하고 다양한 로봇, 자동차, AR/VR 애플리케이션 전반에 걸쳐 배포 속도가 느려집니다.
이러한 문제를 해결하기 위해 시장 참가자들은 플랫폼에 구애받지 않는 모듈식 SLAM 솔루션을 개발하고 있습니다. 다양한 센서 및 프로세서와의 원활한 호환성을 지원하는 표준화된 미들웨어, API 및 센서 융합 프레임워크를 구축하는 데 중점을 두고 있습니다.
시장 참가자들은 크로스 플랫폼 SLAM 라이브러리에 투자하고 ROS(로봇 운영 체제)와 같은 오픈 소스 생태계를 활용하고 있습니다. 하드웨어 제조업체와의 전략적 협력과 AI 기반 자동 보정 도구 채택을 통해 통합을 단순화하고 개발 시간을 단축하며 다양한 환경과 장치에서 강력한 성능을 보장할 수 있습니다.
모바일 로봇공학에서 Visual SLAM의 사용 증가
SLAM 시장의 주요 추세는 복잡한 환경에서 실시간 인식과 자율 탐색을 가능하게 하기 위해 모바일 로봇 공학에서 시각적 SLAM의 사용이 증가하고 있다는 것입니다. 로봇 공학 개발자는 카메라 데이터와 AI 알고리즘을 결합하여 외부 인프라에 의존하지 않고도 상세한 공간 지도를 생성하고 움직임을 추적하는 비전 기반 시스템을 통합하고 있습니다.
이로 인해 창고, 공장 및 서비스 환경 전반에 지능형 로봇이 배치됩니다. 이러한 발전을 통해 위치 파악 정확도와 환경 인식이 향상되어 모바일 로봇이 산업 환경에서 더 큰 유연성, 확장성 및 의사 결정 능력을 달성할 수 있게 되었습니다.
SLAM(동시 위치 파악 및 매핑) 업계의 주요 업체들은 AI 기반 3D 비전 기술을 통합하여 모바일 로봇 시스템의 공간 인식 및 자율 탐색을 향상시키고 있습니다. 그들은 역동적인 실제 환경에서의 운영을 지원하기 위해 SLAM 솔루션의 유연성, 정확성 및 확장성을 개선하는 데 중점을 두고 있습니다.
또한 더 빠른 설정을 위해 매핑 시스템을 최적화하고, 변화하는 조건에 적응하는 알고리즘을 개발하며, 중단 없는 성능을 보장하기 위해 실시간 데이터 처리를 개선하고 있습니다.
자주 묻는 질문