Одновременная локализация и размеры рынка картирования, доля, анализ роста и отрасли, по типу (EKF Slam, Fast Slam, Slam на основе графика, другие), предлагая (2D Slam, 3D Slam), по применению (БПЛА, Роботы, AR/VR, Автономные транспортные средства) и региональный анализ,, 2025-2032
Страницы: 170 | Базовый год: 2024 | Релиз: August 2025 | Автор: Versha V. | Последнее обновление : August 2025
Одновременная локализация и картирование (SLAM)-это вычислительный метод, который позволяет автономным системам, таким как роботы, беспилотники и самостоятельные транспортные средства, для создания карты незнакомых средств и определения их позиции в ней.
Он использует данные от датчиков, таких как LIDAR, камеры и инерционные измерительные единицы (IMUS) для выполнения картирования и локализации в реальном времени. Это поддерживает точную навигацию и предотвращение препятствий в GPS-разбранных или незнакомых областях. Slam широко используется в робототехнике, дополненной реальности, автономных транспортных средствах и беспилотных летательных системах.
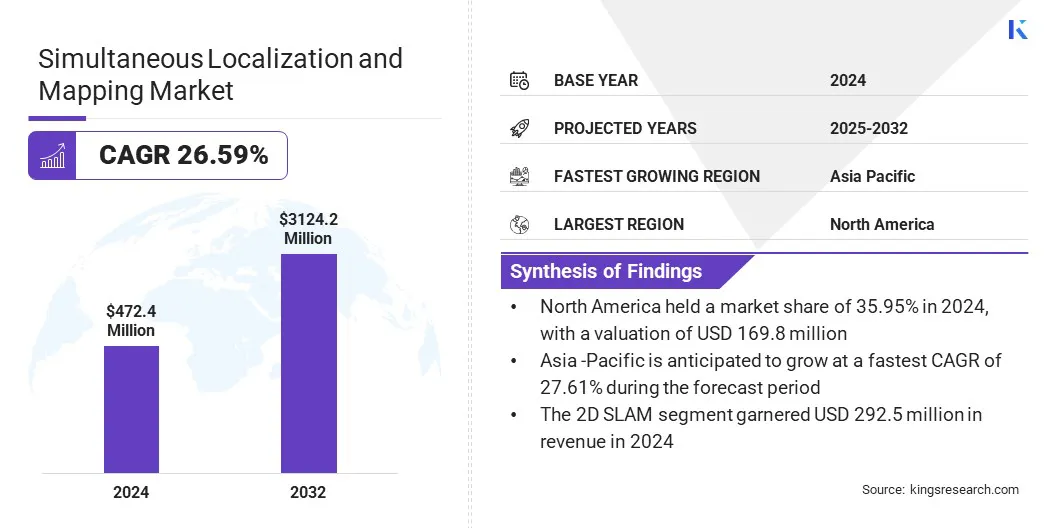
В 2024 году глобальный размер рынка одновременной локализации и картирования оценивался в 472,4 млн. Долл. США и, по прогнозам, и к 2032 году вырастет с 597,1 млн. Долл. США до 3,124,2 млн. Долл. США, в течение прогнозируемого периода в течение прогнозируемого периода.
Увеличение внедрения Slam в логистической автоматизации и складской робототехнике ускоряет рост рынка, поддерживая автономную навигацию, оптимизируя эффективность рабочего процесса и снижение эксплуатационных расходов на крупномасштабных объектах. Более того, растущая интеграция Slam с AR и VR вызывает рынок, позволяя иммерсивному опыту и улучшая пространственное картирование.
Ключевые основные моменты:
Размер одновременной локализации и картирования в 2024 году был зарегистрирован на уровне 472,4 млн. Долл. США.
Предполагается, что рынок вырастет в среднем на 26,59% с 2025 по 2032 год.
В 2024 году в Северной Америке доля рынка составила 35,95% с оценкой 169,8 млн. Долл. США.
Сегмент EKF Slam получил 171,1 млн. Долл. США в 2024 году.
Ожидается, что сегмент 2D SLAM достигнет 1 883,3 млн. Долл. США к 2032 году.
В 2024 году сегмент БПЛА занимал 28,08%.
Ожидается, что в Азиатско -Тихоокеанском регионе вырастет в среднем на 27,61% в течение прогнозируемого периода.
Основными компаниями, работающими на рынке одновременной локализации и картирования, являются Rolepath Robotics, Maxst Co., Ltd, Qualcomm Technologies, Inc, Martinez GeoSpatial, Slamcore Ltd, Ouster Inc, Faro, Kudan, Navvis, Abb Ltd, Boston Engineering, Intel Corporation, Nvidia Corporation, Samsung и Kuka Aga.
Опыт отчета об одновременной локализации и картировании рынка
Сегментация
Подробности
По типу
EKF SlamВFast Slam, Graph Slam, другие
Предлагая
2D Slam, 3D Slam
По приложению
БПЛА, Роботы, AR/VR, автономные транспортные средства, другие
По региону
Северная Америка: США, Канада, Мексика
Европа: Франция, Великобритания, Испания, Германия, Италия, Россия, остальная часть Европы
Азиатско-Тихоокеанский регион: Китай, Япония, Индия, Австралия, АСЕАН, Южная Корея, остальная часть Азиатско-Тихоокеанского региона
Ближний Восток и Африка: Турция, США, Саудовская Аравия, Южная Африка, остальная часть Ближнего Востока и Африки
Южная Америка: Бразилия, Аргентина, остальная часть Южной Америки
Одновременная локализация и рынок картированияРегиональный анализ
Основываясь на регионе, рынок был классифицирован в Северной Америке, Европе, Азиатско -Тихоокеанском регионе, Ближнем Востоке и Африке и Южной Америке.
Северная АмерикаОдновременная локализация и рынок картированияДоля составляла около 35,95% в 2024 году, с оценкой 169,8 миллиона долларов США. Это доминирование объясняется растущей интеграцией сервисов картирования и пространственных данных на основе AI по всему региону. Предприятия в регионе инвестируют в локализацию в реальном времени и облачную инфраструктуру картирования для поддержки продвижения технологий автоматического вождения.
Разработка навигационных систем, разработанных для виртуального тестирования и проверки автоматических функций вождения, является ускорением развертывания шлам в автомобильных и мобильных секторах путем снижения затрат на тестирование, сокращение циклов разработки и повышения безопасности, тем самым способствуя расширению рынка в регионе.
Кроме того, организации в регионе используют расширенное местоположение и платформы картирования, которые могут обрабатывать большие объемы пространственных данных в реальном времени для поддержки подключенных и автоматизированных систем транспортных средств, включая автономное вождение и приложения помощи водителю. Региональные предприятия продолжают инвестировать в технологии локализации, чтобы обеспечить точную навигацию и пространственную осведомленность, дополнительно поддерживая расширение рынка в регионе.
В январе 2025 года здесь технологиипартнерствос AWS для поддержки управляемых искусственным интеллектом и услугами местоположения для программных автомобилей. Сотрудничество фокусируется на том, чтобы обеспечить навигацию в реальном времени и пространственную обработку данных, способствуя приложениям, связанным с SLAM, в системах автоматического вождения.
Азиатско -тихоокеанская одновременная локализация и картирование отрасль будет расти с надежным среднем на 27,61% в течение прогнозируемого периода. Этот рост объясняется растущим внедрением технологий визуальных шлемов в новых приложениях, таких как трансляция дополненной реальности и системы расширенного восприятия в регионе.
Ключевые игроки развертывают решения Slam для охвата в прямом эфире, доставки контента дополненной реальности и иммерсивного цифрового опыта. Это приводит к более широкому внедрению в таких секторах, как спорт, развлечения и цифровые медиа, в дополнение к установленному использованию в промышленной робототехнике. Растущий объем приложений ускоряет коммерческое развертывание и технологическое развитие в регионе.
Одновременная локализация и рынок картированияОбзор
Кроме того, интеграция Visual Slam и Edge AI в автономную мобильную робототехнику управляет рынком, обеспечивая экономически эффективные и масштабируемые роботизированные решения. Это снижает зависимость от дорогих датчиков, таких как LIDAR, и поддерживает навигацию в реальном времени в динамических средах. Это продвижение расширяет усыновление SLAM в рамках логистики, производства и здравоохранения.
В январе 2025 года Nexaiot выпустила своего автономного мобильного робота Nexmov-2 в CES, в котором изображен Visual Slam, 3D Vision, AI-Power, и NPU Kl730 от Kneron. Разработанный для промышленного использования, он обеспечивает точную навигацию без лидара, предлагая масштабируемое и эффективное развертывание.
Рыночный драйвер
Растущее внедрение Slam в логистической автоматизации и складской робототехнике
Ключевым драйвером на рынке Slam является растущее внедрение технологии Slam в области автоматизации логистики иСклад робототехникиПолем Логистические и складские операторы все чаще используют автономные мобильные роботы (AMRS), основанные на технологии SLAM для устранения растущей сложности цепочки поставок и нехватки рабочей силы. Эти системы поддерживают эффективную навигацию и принятие решений в реальном времени, что помогает предприятиям поддерживать высокую производительность и адаптивность.
Slam обеспечивает точную локализацию и картирование в настройках динамического склада и снижает необходимость в фиксированной инфраструктуре. Этот сдвиг приводит к повышению эффективности и масштабируемости технологии SLAM в современных внутрипологичных данных.
В ноябре 2024 года Geek+ представила свое решение робота только для видения в партнерстве с Intel, в которой представлены технология V-Slam и модули Visual Navigation Intel. Система позволяет автономным мобильным роботам ориентироваться без внешних датчиков, стремясь повысить точность и эффективность в операциях по логистике.
Рыночный вызов
Трудности интеграции на гетерогенных аппаратных платформах
Трудности интеграции на гетерогенных аппаратных платформах представляют собой серьезную проблему для рынка шлема. Устройства систем с поддержкой Slam часто используют различные датчики, процессоры, операционные системы и протоколы связи, что делает их сложными для обеспечения бесшовной совместимости.
Обеспечение совместимости между такими компонентами, как лидар, камеры, IMUS и встроенные процессоры, требует обширной калибровки и настройки. Эти несоответствия могут привести к отставанию производительности, неточной локализации или сбоям системы. Кроме того, отсутствие стандартизированных интерфейсов и промежуточного программного обеспечения увеличивает затраты на разработку и замедляет развертывание в различных приложениях роботизированных, автомобильных и AR/VR.
Чтобы решить эту проблему, игроки рынка разрабатывают модульные и платформу-агрессические решения. Они сосредотачиваются на создании стандартизированного промежуточного программного обеспечения, API и слияния датчиков, которые поддерживают бесшовную совместимость с различными датчиками и процессорами.
Игроки рынка инвестируют в кроссплатформенные библиотеки Slam и используют экосистемы с открытым исходным кодом, такие как ROS (операционная система робота). Стратегическое сотрудничество с производителями оборудования и внедрение инструментов автоматической калибровки, управляемых искусственным интеллектом, еще больше помогает упростить интеграцию, сократить время разработки и обеспечить надежную производительность в различных средах и устройствах.
Тенденция рынка
Растущее использование визуального удара в мобильной робототехнике
Основной тенденцией на рынке SLAM является растущее использование визуального шлема в мобильной робототехнике, чтобы обеспечить восприятие в реальном времени и автономную навигацию в сложных средах. Разработчики робототехники интегрируют системы, основанные на зрении, которые объединяют данные камеры с алгоритмами искусственного интеллекта для создания подробных пространственных карт и отслеживания движения, не полагаясь на внешнюю инфраструктуру.
Это вызывает развертывание интеллектуальных роботов на складах, фабриках и среде обслуживания. Эти достижения повышают точность локализации и экологическую осведомленность, что позволяет мобильным роботам достигать большей гибкости, масштабируемости и принятия решений в промышленных средах.
В мае 2024 года ABB запустила свой автономный мобильный робот с помощью ABB Tug Tug TGA, включавший в себя технологию Visual Slam с использованием AMR и программный пакет AMR Studio.Робот объединяет 3D -зрение и ИИ, чтобы различать динамические и статические объекты, работают независимо в сложных условиях и сокращают время ввода в эксплуатацию. Запуск поддерживает более широкое внедрение интеллектуальных, масштабируемых систем SLAM в логистике и производстве.
Сегментация рынка:
По типу (EKF Slam, Fast Slam, Graph Slam и другие): сегмент EKF Slam заработал 171,1 млн. Долл. США в 2024 году из-за ее вычислительной эффективности и широкого использования в системах с низкой мощью.
Предлагая (2D Slam и 3D Slam): 2 -й сегмент Slam содержал 61,92% рынка в 2024 году из -за его простоты, более низких требований к обработке и пригодности для структурированных сред.
По приложению (БПЛА, роботов, AR/VR и автономных транспортных средств): к 2032 году сегмент БПЛА достигнет 878,2 млн. Долларов США из-за увеличения развертывания беспилотников с поддержкой сбоев для картирования, наблюдения и операций доставки.
Нормативные рамки
В СШАФедеральная комиссия по связи (FCC) регулирует беспроводную связь и радиочастотный спектр, используемый в устройствах с поддержкой Slam. Это гарантирует, что такие датчики, как LiDAR, радар и беспроводные модули, работают в авторизованных полосах частот, чтобы избежать помех.
В Китае, Министерство промышленности и информационных технологий (MIIT) регулирует устройства Slam, наблюдая за лицензированием, использованием спектра и соблюдению кибербезопасности и промышленных стандартов.
В ИндииТелекоммуникационный инженерный центр (TEC) в рамках Департамента телекоммуникаций регулирует технические стандарты для беспроводных датчиков и коммуникационных интерфейсов, используемых в Slam Systems. Он сертифицирует оборудование для безопасности и электромагнитной совместимости.
Конкурентная ландшафт
Основные игроки в индустрии одновременной локализации и картирования (SLAM) интегрируют технологии 3D Vision с AI, чтобы повысить пространственную осведомленность и автономную навигацию в мобильных роботизированных системах. Они сосредоточены на повышении гибкости, точности и масштабируемости решений для поддержки операций в динамических, реальных средах.
Кроме того, они оптимизируют системы отображения для более быстрой настройки, разрабатывая алгоритмы, которые адаптируются к изменяющимся условиям и уточняют обработку данных в реальном времени для обеспечения непрерывной производительности.
В январе 2024 года ABB приобрел швейцарский стартап Sevensense, разработчик технологии Visual Slam для Ai-поддержки дляАвтономные мобильные роботыПолем Приобретение укрепляет позицию ABB в AMR следующего поколения, интегрируя навигацию 3D Vision в свой портфель робототехники.
Ключевые компании в области одновременной локализации и картирования рынка:
В марте 2025 года, Meta представила интеллектуальные очки Aria Gen 2 в качестве исследования, ориентированного на исследования, оснащенного камерами 6DOF Slam, обработкой в режиме реального времени и мультимодальными датчиками. Направленное на продвижение восприятия машины, робототехники и исследования доступности, устройство служит платформой для тестирования пространственной осведомленности и взаимодействия с AI.
Новый
Часто задаваемые вопросы
Каков ожидаемый CAGR для одновременной локализации и картирования рынка в течение прогнозируемого периода?
Насколько велика была индустрия в 2024 году?
Каковы основные факторы, способствующие рынку?
Кто является ключевыми игроками на рынке?
Какой самый быстрорастущий регион на рынке в прогнозируемый период?
Предполагается, что какой сегмент будет иметь самую большую долю рынка в 2032 году?
Автор
Верша является воплощением энергии, с более чем двух десятилетий опыта управления сквозными консалтинговыми заданиями в области продуктов питания и напитков, потребительских товаров, ИКТ-ИКТ и аэрокосмических областей. Верша приносит на стол не только свой опыт, но и свою страсть к распутыванию тонкостей рынка. С острым мышлением и любопытным умом она опытно перемещается через данные, чтобы раскрыть ценную информацию. Верша - не просто эксперт по данным, но и квалифицированный лидер. Используя свою аналитическую хватку, она направляет исследовательские усилия с точностью и ясностью, превращая проблемы в возможности. Независимо от того, анализирует ли она тенденции, наставнирует свою команду или привлекая клиентов с ее остроумием, Верша использует свой обширный опыт отрасли для обеспечения результатов.
Имея более десяти лет опыта руководства исследованиями на глобальных рынках, Ганапати обладает острым суждением, стратегической ясностью и глубокой отраслевой экспертизой. Известный своей точностью и непоколебимой приверженностью качеству, он направляет команды и клиентов с инсайтами, которые постоянно обеспечивают значимые бизнес-результаты.


 Одновременная локализация и рынок картирования
Одновременная локализация и рынок картирования