市場の定義
同時ローカリゼーションとマッピング(SLAM)は、ロボット、ドローン、自動運転車などの自律システムが、なじみのない環境の地図を作成し、その中の位置を決定できるようにする計算手法です。
LIDAR、カメラ、慣性測定ユニット(IMU)などのセンサーからのデータを使用して、リアルタイムマッピングとローカリゼーションを実行します。これは、GPSが除外またはなじみのない領域での正確なナビゲーションと障害物の回避をサポートします。 SLAMは、ロボット工学、拡張現実、自動運転車、無人航空システムで広く使用されています。
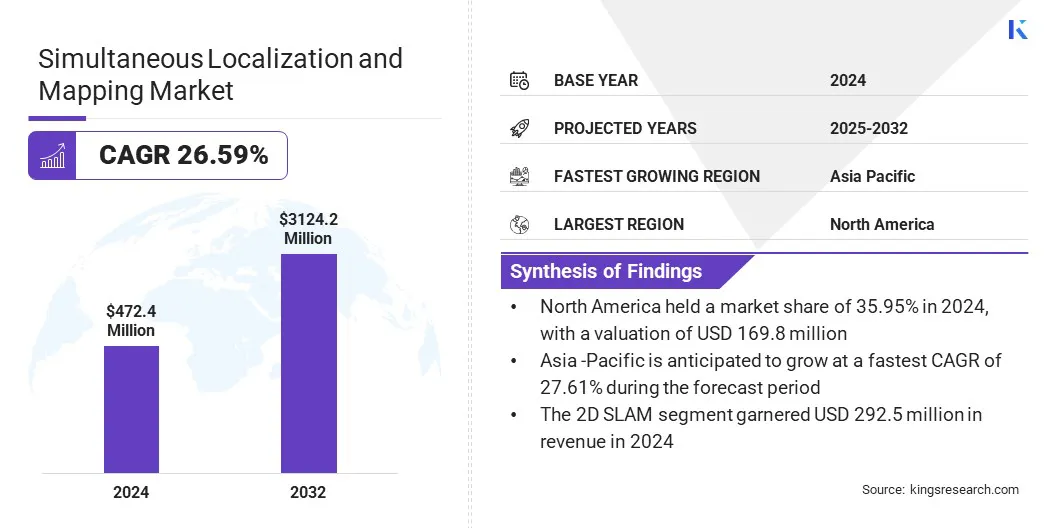
グローバルな同時ローカリゼーションとマッピング市場規模は、2024年には4億7,240万米ドルと評価され、2025年の597.1百万米ドルから2032年までに3,124.2百万米ドルに成長すると予測されており、予測期間中は26.59%のCAGRを示しました。
ロジスティクスオートメーションおよび倉庫ロボット工学におけるSLAMの実装の増加は、自律的なナビゲーションをサポートし、ワークフローの効率を最適化し、大規模な施設での運用コストを削減することにより、市場の成長を促進しています。さらに、ARおよびVRとのスラム統合の拡大により、没入型の体験を可能にし、空間マッピングを改善することにより、市場を促進しています。
重要なハイライト:
同時ローカリゼーションとマッピング業界規模は、2024年に4億7,240万米ドルで記録されました。 市場は、2025年から2032年にかけて26.59%のCAGRで成長すると予測されています。 北米は2024年に35.95%の市場シェアを保持し、1億6,980万米ドルの評価を受けました。 EKF SLAMセグメントは、2024年に1億7,110万米ドルの収益を集めました。 2D SLAMセグメントは、2032年までに1,883.3百万米ドルに達すると予想されます。 UAVセグメントは、2024年に28.08%の市場シェアを保有していました。 アジア太平洋地域は、予測期間中に27.61%のCAGRで成長すると予想されています。
同時ローカリゼーションとマッピング市場で事業を展開する大手企業は、ClearPath Robotics、Maxst Co.、Ltd、Qualcomm Technologies、Inc、Martinez Geospatial、Slamcore Ltd、Oouster Inc、Faro、Kudan、Navvis、Abb Ltd、Boston Engineering、Intel Corporation、Nvidia Corporation、Samsung、Kukaです。
同時ローカリゼーションとマッピング市場レポートの範囲
セグメンテーション
詳細
タイプごとに
EKFスラム、 高速スラム、グラフベースのスラム、その他
提供することによって
2Dスラム、3Dスラム
アプリケーションによって
UAV、ロボット、AR/VR、自動運転車、その他
地域別
北米 :米国、カナダ、メキシコ
ヨーロッパ :フランス、英国、スペイン、ドイツ、イタリア、ロシア、ヨーロッパのその他
アジア太平洋 :中国、日本、インド、オーストラリア、ASEAN、韓国、アジア太平洋地域の残り
中東とアフリカ :トルコ、U.A.E。、サウジアラビア、南アフリカ、中東の残りの部分とアフリカ
南アメリカ :ブラジル、アルゼンチン、南アメリカの残り
同時ローカリゼーションとマッピング市場地域分析
地域に基づいて、市場は北米、ヨーロッパ、アジア太平洋、中東、アフリカ、南アメリカに分類されています。
北米同時ローカリゼーションとマッピング市場 株式は2024年に約35.95%であり、1億6,980万米ドルの評価がありました。この優位性は、地域全体でAIを搭載したマッピングと空間データサービスの統合の拡大に起因しています。この地域の企業は、自動化された運転技術の進歩をサポートするために、リアルタイムのローカリゼーションとクラウドベースのマッピングインフラストラクチャに投資しています。
自動化された運転機能の仮想テストと検証のために設計されたナビゲーションシステムの開発は、テストコストを削減し、開発サイクルを短縮し、安全性を高めることにより、自動車およびモビリティセクターのSLAM展開を加速し、それによって地域の市場拡大に貢献しています。
さらに、この地域の組織は、自律運転やドライバー支援アプリケーションなどの接続された自動車システムをサポートするために、大量のリアルタイム空間データを処理できる高度な場所とマッピングプラットフォームを採用しています。地域企業は、正確なナビゲーションと空間的認識を可能にするために、ローカライズ技術に引き続き投資し、この地域の市場拡大をさらにサポートしています。
2025年1月、ここでテクノロジー 提携 AWSを使用して、ソフトウェア定義の車両のAI駆動型マッピングとロケーションサービスをサポートします。このコラボレーションは、リアルタイムナビゲーションと空間データ処理の有効化に焦点を当てており、自動運転システムでのSLAM関連アプリケーションに貢献しています。
アジア太平洋の同時ローカリゼーションとマッピング業界は、予測期間にわたって27.61%の堅牢なCAGRで成長するように設定されています。この成長は、拡張現実放送やこの地域の高度な知覚システムなどの新たなアプリケーション全体で視覚的なスラム技術の採用の増加に起因しています。
キープレーヤーは、ライブイベントカバレッジ、拡張現実コンテンツの配信、没入型のデジタルエクスペリエンスのためにSLAMソリューションを展開しています。これは、産業用ロボット工学での確立された使用に加えて、スポーツ、エンターテイメント、デジタルメディアなどのセクター全体でより広く採用されています。アプリケーションの範囲の増加は、この地域の商業展開と技術の進歩を促進しています。
同時ローカリゼーションとマッピング市場概要
さらに、自律的なモバイルロボット工学におけるVisual SlamとEdge AIの統合により、費用対効果の高いスケーラブルなロボットソリューションを可能にすることにより、市場を促進しています。 LIDARなどの高価なセンサーへの依存を減らし、動的環境でのリアルタイムナビゲーションをサポートします。この進歩により、物流、製造業、ヘルスケア業界全体でSLAMの採用が拡大しています。
2025年1月、NexaiotはCESでNexmov-2自律モバイルロボットを発売し、Visual Slam、AI搭載の3Dビジョン、KneronのKL730 NPUを備えています。産業用に設計されており、LIDARなしで正確なナビゲーションを可能にし、スケーラブルで効率的な展開を提供します。
マーケットドライバー ロジスティクスオートメーションと倉庫ロボット工学におけるスラムの採用の拡大
スラム市場の主要なドライバーは、ロジスティクスオートメーションにおけるスラムテクノロジーの採用の増加です。倉庫ロボット 。ロジスティクスと倉庫のオペレーターは、サプライチェーンの複雑さと労働力不足の増加に対処するために、スラムテクノロジーを搭載した自律モバイルロボット(AMR)をますます採用しています。これらのシステムは、効率的なナビゲーションとリアルタイムの意思決定をサポートし、企業が高い生産性と適応性を維持するのに役立ちます。
SLAMは、動的な倉庫設定内での正確なローカリゼーションとマッピングを提供し、固定インフラストラクチャの必要性を減らします。このシフトは、現代の内気学におけるSLAMテクノロジーの効率とスケーラビリティを向上させます。
2024年11月、Geek+は、V-SLALテクノロジーとIntelのVisual Navigationモジュールを備えたIntelとのパートナーシップで、Visionのみのロボットソリューションを導入しました。このシステムにより、自動運用モバイルロボットは外部センサーなしでナビゲートでき、物流操作の精度と効率を向上させることを目指しています。
市場の課題 不均一なハードウェアプラットフォーム全体の統合の問題
異種のハードウェアプラットフォーム全体の統合の困難は、スラム市場にとって大きな課題をもたらします。 SLAM対応システムデバイスは、さまざまなセンサー、プロセッサ、オペレーティングシステム、および通信プロトコルを使用することが多く、シームレスな相互運用性を実現するために複雑にします。
LIDAR、カメラ、IMU、埋め込みプロセッサなどのコンポーネント間の互換性を確保するには、広範なキャリブレーションとカスタマイズが必要です。これらの矛盾は、パフォーマンスの遅れ、不正確なローカリゼーション、またはシステムの障害につながる可能性があります。さらに、標準化されたインターフェイスとミドルウェアがないため、開発コストが増加し、多様なロボット、自動車、AR/VRアプリケーション全体の展開が遅くなります。
この課題に対処するために、マーケットプレーヤーはモジュール式およびプラットフォームに依存しないスラムソリューションを開発しています。彼らは、さまざまなセンサーやプロセッサとのシームレスな互換性をサポートする標準化されたミドルウェア、API、およびセンサー融合フレームワークの構築に焦点を当てています。
マーケットプレーヤーは、クロスプラットフォームのスラムライブラリに投資し、ROS(ロボットオペレーティングシステム)などのオープンソースエコシステムを活用しています。ハードウェアメーカーとの戦略的コラボレーションとAI駆動型の自動キャリブレーションツールの採用により、統合の簡素化、開発時間の短縮、多様な環境とデバイス全体の堅牢なパフォーマンスが可能になります。
市場動向 モバイルロボット工学での視覚スラムの使用の増加
スラム市場の主要な傾向は、複雑な環境でのリアルタイムの知覚と自律的なナビゲーションを可能にするために、モバイルロボット工学での視覚的なスラムの使用の増加です。 Robotics開発者は、カメラデータとAIアルゴリズムを組み合わせて、外部インフラストラクチャに依存することなく詳細な空間マップを生成し、動きを追跡するビジョンベースのシステムを統合しています。
これにより、倉庫、工場、サービス環境全体にインテリジェントロボットが展開されます。これらの進歩により、ローカリゼーションの精度と環境意識が向上し、モバイルロボットが産業環境での柔軟性、スケーラビリティ、意思決定機能を高めることができます。
2024年5月、ABBは、AI対応のVisual SlamテクノロジーとAMR Studio Software Suiteを備えたFlexley Tug T702 Autonomous Mobile Robotを発売しました。 ロボットは、3DビジョンとAIを組み合わせて、動的オブジェクトと静的オブジェクトを区別し、複雑な環境で独立して動作し、試運転時間を短縮します。この打ち上げは、物流および製造部門におけるインテリジェントでスケーラブルなスラムシステムのより広範な採用をサポートしています。
市場セグメンテーション:
タイプ(EKFスラム、高速スラム、グラフベースのスラムなど):EKF SLAMセグメントは、低電力埋め込みシステムでの計算効率と広範な使用により、2024年に1億7,110万米ドルを獲得しました。 提供することにより(2D SLAMおよび3D SLAM):2D SLAMセグメントは、2024年に市場の61.92%を保持しました。 アプリケーション(UAV、ロボット、AR/VR、および自動運転車):UAVセグメントは、マッピング、監視、および配信作業のためのSLAM対応ドローンの展開の増加により、2032年までに8億7,820万米ドルに達すると予測されています。
規制枠組み
米国で 、連邦通信委員会(FCC)は、SLAM対応デバイスで使用されるワイヤレス通信および無線周波数スペクトルを規制しています。干渉を避けるために、Lidar、レーダー、ワイヤレスモジュールなどのセンサーが承認された周波数帯域内で動作することを保証します。中国で 、産業情報技術省(MIIT)は、ライセンス、スペクトルの使用、およびサイバーセキュリティおよび産業基準の遵守を監督することにより、SLAMデバイスを規制しています。インドで 、電気通信部の下の通信工学センター(TEC)は、SLAMシステムで使用されるワイヤレスセンサーと通信インターフェイスの技術基準を規制しています。安全性と電磁互換性のために機器を証明します。
競争力のある風景
同時ローカリゼーションとマッピング(SLAM)業界の主要なプレーヤーは、モバイルロボットシステムの空間的認識と自律ナビゲーションを強化するために、AI駆動の3Dビジョン技術を統合しています。彼らは、SLAMソリューションの柔軟性、精度、およびスケーラビリティを改善して、動的で実世界の環境での運用をサポートすることに焦点を当てています。
さらに、マッピングシステムを最適化してセットアップを高速化し、条件の変化に適応するアルゴリズムを開発し、リアルタイムのデータ処理を洗練して途切れないパフォーマンスを確保しています。
2024年1月、ABBはAI対応のVisualSlamテクノロジーの開発者であるSwiss Startup Sevensenseを買収しました。自律的なモバイルロボット 。この買収により、3D Vision Navigationをロボティクスポートフォリオに統合することにより、次世代AMRSにおけるABBの位置が強化されます。
同時ローカリゼーションとマッピング市場の主要企業:
ClearPathロボット工学。 Maxst Co.、Ltd Qualcomm Technologies、Inc マルティネス地理空間 Slamcore Ltd Ouster Inc ファロ クダン Navvis Abb Ltd ボストンエンジニアリング Intel Corporation Nvidia Corporation サムスン Kuka AG。
最近の開発(製品の発売)
2025年3月 、メタは、6DOFスラムカメラ、リアルタイムオンデバイス処理、およびマルチモーダルセンサーを備えた研究指向のデバイスとしてARIA Gen 2スマートメガネを導入しました。機械の知覚、ロボット工学、アクセシビリティ調査を進めることを目的としたこのデバイスは、空間認識とAI駆動型の相互作用をテストするためのプラットフォームとして機能します。
新しい
よくある質問
予測期間にわたって同時ローカリゼーションとマッピング市場に期待されるCAGRは何ですか?
予測期間に市場で最も急速に成長している地域はどれですか?
2032年に市場で最大のシェアを保有すると予想されるセグメントはどれですか?


 同時ローカリゼーションとマッピング市場
同時ローカリゼーションとマッピング市場